Jakarta: ChatGPT menandai momen ledakan besar AI generatif. Jawaban dapat dihasilkan sebagai tanggapan atas hampir semua pertanyaan, membantu mengubah pekerjaan digital seperti pembuatan konten, layanan pelanggan, pengembangan perangkat lunak, dan operasi bisnis untuk pekerja pengetahuan.
AI fisik, perwujudan kecerdasan buatan dalam humanoid, pabrik, dan perangkat lain dalam sistem industri, belum mendapatkan momen terobosannya. Hal ini telah menghambat industri seperti transportasi dan mobilitas, manufaktur, logistik, dan robotika. Namun, itu akan berubah berkat tiga komputer yang menyatukan pelatihan, simulasi, dan inferensi tingkat lanjut.
Kebangkitan AI Fisik Multimodal
Selama 60 tahun, "Software 1.0" - kode serial yang ditulis oleh pemrogram manusia - berjalan pada komputer serba guna yang ditenagai oleh CPU. Kemudian, pada tahun 2012, Alex Krizhevsky, yang dibimbing oleh Ilya Sutskever dan Geoffrey Hinton, memenangkan kompetisi pengenalan gambar komputer ImageNet dengan AlexNet, model pembelajaran mendalam revolusioner untuk klasifikasi gambar.
Ini menandai kontak pertama industri dengan AI. Terobosan pembelajaran mesin — jaringan saraf yang berjalan pada GPU — memulai era Software 2.0. Saat ini, perangkat lunak menulis perangkat lunak. Beban kerja komputasi dunia bergeser dari komputasi tujuan umum pada CPU ke komputasi yang dipercepat pada GPU, meninggalkan hukum Moore jauh di belakang.
Dengan AI generatif, transformator multimodal dan model difusi telah dilatih untuk menghasilkan respons. Model bahasa besar bersifat satu dimensi, mampu memprediksi token berikutnya, dalam mode seperti huruf atau kata. Model pembuatan gambar dan video bersifat dua dimensi, mampu memprediksi piksel berikutnya.
Tak satu pun dari model ini dapat memahami atau menafsirkan dunia tiga dimensi. Dan di situlah AI fisik masuk. Model AI fisik dapat memahami, memahami, berinteraksi dengan, dan menavigasi dunia fisik dengan AI generatif. Dengan komputasi yang dipercepat, terobosan AI fisik multimodal dan simulasi berbasis fisik skala besar memungkinkan dunia untuk mewujudkan nilai AI fisik melalui robot.
Robot adalah sistem yang dapat memahami, bernalar, merencanakan, bertindak, dan belajar. Robot sering dianggap sebagai robot seluler otonom (AMR), lengan manipulator atau humanoid. Tetapi ada lebih banyak jenis perwujudan robot.
Dalam waktu dekat, segala sesuatu yang bergerak, atau yang memantau hal-hal yang bergerak, akan menjadi sistem robot otonom. Sistem ini akan mampu merasakan dan merespons lingkungannya.
Segala sesuatu mulai dari ruang bedah hingga pusat data, gudang hingga pabrik, bahkan sistem kontrol lalu lintas atau seluruh kota pintar akan berubah dari sistem statis yang dioperasikan secara manual menjadi sistem otonom dan interaktif yang diwujudkan oleh AI fisik.
Perbatasan Berikutnya: Robot Humanoid
Robot humanoid adalah manifestasi robot serba guna yang ideal karena dapat beroperasi secara efisien di lingkungan yang dibangun untuk manusia, sambil membutuhkan penyesuaian minimal untuk penyebaran dan pengoperasian.
Pasar global untuk robot humanoid diperkirakan akan mencapai $ 38 miliar pada tahun 2035, meningkat lebih dari enam kali lipat dari sekitar $ 6 miliar untuk periode yang diperkirakan hampir dua tahun lalu, menurut Goldman Sachs.
Para peneliti dan pengembang di seluruh dunia berlomba untuk membangun gelombang robot berikutnya.
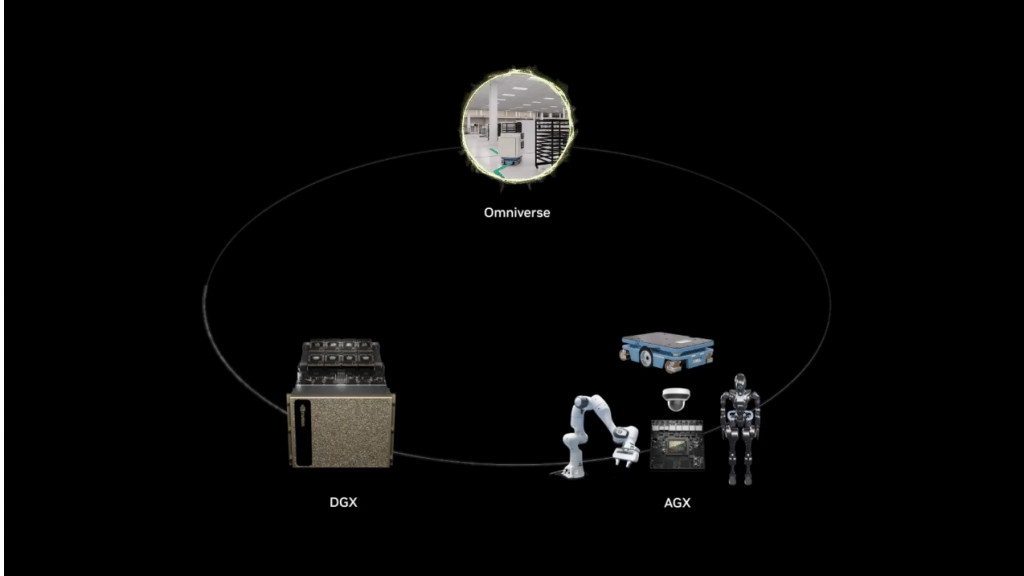
Tiga Komputer untuk Mengembangkan AI Fisik
Untuk mengembangkan robot humanoid, tiga sistem komputer yang dipercepat diperlukan untuk menangani AI fisik dan pelatihan robot, simulasi, dan runtime. Dua kemajuan komputasi mempercepat pengembangan robot humanoid: model fondasi multimodal dan simulasi robot dan dunia mereka yang dapat diskalakan dan berbasis fisik.
Terobosan dalam AI generatif membawa persepsi 3D, kontrol, perencanaan keterampilan, dan kecerdasan ke robot. Simulasi robot dalam skala besar memungkinkan pengembang menyempurnakan, menguji, dan mengoptimalkan keterampilan robot di dunia virtual yang meniru hukum fisika — membantu mengurangi biaya akuisisi data dunia nyata dan memastikan mereka dapat bekerja dalam pengaturan yang aman dan terkontrol.
NVIDIA telah membangun tiga komputer dan mempercepat platform pengembangan untuk memungkinkan pengembang membuat AI fisik.
Pertama, model dilatih pada superkomputer. Pengembang dapat menggunakan NVIDIA NeMo pada platform DGX untuk melatih dan menyempurnakan model AI generatif dan fondasi yang kuat. Mereka juga dapat memanfaatkan Project GR00T, sebuah inisiatif untuk mengembangkan model fondasi tujuan umum untuk robot humanoid untuk memungkinkan mereka memahami bahasa alami dan meniru gerakan dengan mengamati tindakan manusia.
Kedua, Omniverse, yang berjalan di server NVIDIA OVX, menyediakan platform pengembangan dan lingkungan simulasi untuk menguji dan mengoptimalkan AI fisik dengan antarmuka dan kerangka kerja pemrograman aplikasi seperti Isaac Sim.
Pengembang dapat menggunakan Isaac Sim untuk mensimulasikan dan memvalidasi model robot, atau menghasilkan sejumlah besar data sintetis berbasis fisik untuk bootstrap pelatihan model robot. Peneliti dan pengembang juga dapat menggunakan Isaac Lab, kerangka kerja pembelajaran robot sumber terbuka yang mendukung pembelajaran penguatan robot dan pembelajaran imitasi, untuk membantu mempercepat pelatihan dan penyempurnaan kebijakan robot.
Terakhir, model AI terlatih disebarkan ke komputer runtime. Komputer robotika NVIDIA Jetson Thor dirancang khusus untuk kebutuhan komputasi on-board yang ringkas. Ansambel model yang terdiri dari kebijakan kontrol, visi dan model bahasa menyusun otak robot dan digunakan pada sistem komputasi tepi on-board yang hemat daya.
Bergantung pada alur kerja dan area tantangan mereka, pembuat robot dan pengembang model fondasi dapat menggunakan platform dan sistem komputasi yang dipercepat sebanyak yang diperlukan.
Membangun Gelombang Fasilitas Otonom Berikutnya
Fasilitas robot dihasilkan dari puncak semua teknologi ini. Produsen seperti Foxconn atau perusahaan logistik seperti Amazon Robotics dapat mengatur tim robot otonom untuk bekerja bersama pekerja manusia dan memantau operasi pabrik melalui ratusan atau ribuan sensor.
Gudang, pabrik, dan pabrik otonom ini akan memiliki kembaran digital. Kembar digital digunakan untuk perencanaan dan pengoptimalan tata letak, simulasi operasi dan, yang paling penting, pengujian perangkat lunak armada robot.
Dibangun di atas Omniverse, "Mega" adalah cetak biru untuk kembar digital pabrik yang memungkinkan perusahaan industri untuk menguji dan mengoptimalkan armada robot mereka dalam simulasi sebelum menerapkannya ke pabrik fisik. Ini membantu memastikan integrasi yang mulus, kinerja optimal, dan gangguan minimal.
Mega memungkinkan pengembang mengisi kembar digital pabrik mereka dengan robot virtual dan model AI mereka, atau otak robot. Robot dalam kembaran digital menjalankan tugas dengan memahami lingkungan mereka, bernalar, merencanakan gerakan mereka selanjutnya dan, akhirnya, menyelesaikan tindakan yang direncanakan.
Tindakan ini disimulasikan di lingkungan digital oleh simulator dunia di Omniverse, dan hasilnya dirasakan oleh otak robot melalui simulasi sensor Omniverse. Dengan simulasi sensor, otak robot memutuskan tindakan selanjutnya, dan loop berlanjut, sementara Mega dengan cermat melacak keadaan dan posisi setiap elemen dalam kembaran digital pabrik.
Metodologi pengujian software-in-the-loop yang canggih ini memungkinkan perusahaan industri untuk mensimulasikan dan memvalidasi perubahan dalam batas-batas aman kembar digital Omniverse, membantu mereka mengantisipasi dan mengurangi potensi masalah untuk mengurangi risiko dan biaya selama penerapan dunia nyata.
Memberdayakan Ekosistem Pengembang
NVIDIA mempercepat pekerjaan ekosistem global pengembang robotika dan pembuat model fondasi robot dengan tiga komputer.
Universal Robots, sebuah perusahaan Teradyne Robotics, menggunakan NVIDIA Isaac Manipulator, perpustakaan akselerasi Isaac dan model AI, dan NVIDIA Jetson Orin untuk membangun UR AI Accelerator, perangkat keras dan perangkat lunak siap pakai yang memungkinkan pengembang cobot membangun aplikasi, mempercepat pengembangan, dan mengurangi waktu ke pasar produk AI.
RGo Robotics menggunakan NVIDIA Isaac Perceptor untuk membantu wheel.me AMR-nya bekerja di mana saja, sepanjang waktu, dan membuat keputusan cerdas dengan memberi mereka persepsi seperti manusia dan informasi visual-spasial.
Pembuat robot humanoid termasuk 1X Technologies, Agility Robotics, Apptronik, Boston Dynamics, Fourier, Galbot, Mentee, Sanctuary AI, Unitree Robotics, dan XPENG Robotics mengadopsi platform pengembangan robotika NVIDIA.
Boston Dynamics menggunakan Isaac Sim dan Isaac Lab untuk membangun robot berkaki empat dan humanoid untuk meningkatkan produktivitas manusia, mengatasi kekurangan tenaga kerja, dan memprioritaskan keselamatan di gudang.
Fourier memanfaatkan Isaac Sim untuk melatih robot humanoid agar beroperasi di bidang yang menuntut interaksi dan kemampuan beradaptasi tingkat tinggi, seperti penelitian ilmiah, perawatan kesehatan, dan manufaktur.
Menggunakan Isaac Lab dan Isaac Sim, Galbot memajukan pengembangan kumpulan data genggaman cekatan robot skala besar yang disebut DexGraspNet yang dapat diterapkan pada tangan robot cekatan yang berbeda, serta lingkungan simulasi untuk mengevaluasi model genggaman cekatan.
Field AI mengembangkan model fondasi multitugas dan multiguna yang terbatas risiko untuk robot beroperasi dengan aman di lingkungan lapangan luar ruangan, menggunakan platform Isaac dan Isaac Lab.
Era AI fisik telah tiba — dan mengubah industri berat dan robotika dunia.
Jadikan Medcom.id sumber informasi pilihan Anda

FOLLOW US
Ikuti media sosial medcom.id dan dapatkan berbagai keuntungan















